Một nhóm các nhà khoa học Việt Nam và quốc tế ở Đại học Công nghệ Nanyang (Singapore), Đại học Osaka và Đại học Hiroshima (Nhật Bản) đã phát triển một thuật toán định hướng bầy đàn tiên tiến dành cho côn trùng máy (cyborg), giúp chúng di chuyển dễ dàng trên những địa hình khó khăn.

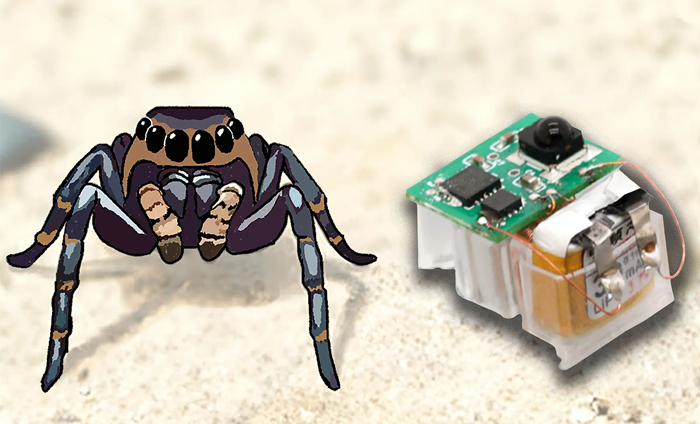
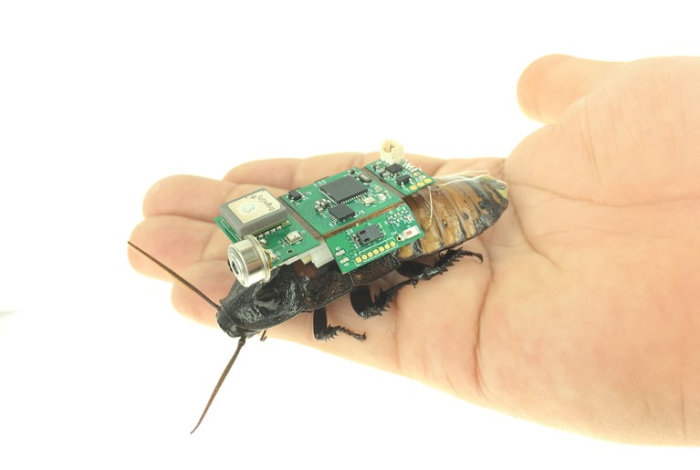
Côn trùng Cyborg là những con côn trùng thực sự được trang bị các thiết bị điện tử nhỏ trên lưng - bao gồm nhiều cảm biến như camera quang học, hồng ngoại, pin và ăng-ten để liên lạc - cho phép con người điều khiển chuyển động của chúng từ xa để thực hiện các nhiệm vụ cụ thể.
Việc kiểm soát một loài côn trùng cyborg đơn nhất lần đầu tiên được Giáo sư Hirotaka Sato từ Trường Kỹ thuật Cơ khí và Hàng không Vũ trụ của Đại học Công nghệ Nanyang, Singapore mô tả vào năm 2008.
Tuy nhiên, một con côn trùng sẽ không thể nào đủ cho các hoạt động như tìm kiếm cứu nạn ở các sự kiện thảm họa - những nơi mà người sống sót sau động đất phân tán ở khắp nơi và chỉ có 72 giờ “vàng” để tìm thấy họ.
Vào năm 2021 và 2024, giáo sư Sato và các đối tác của ông từ Cơ quan Khoa học và Công nghệ Home Team (HTX) của Singapore và Klass Engineering and Solutions đã chứng minh cách côn trùng cyborg có thể được sử dụng cho các hoạt động tìm kiếm và cứu nạn trong tương lai.
Trong bài báo mới nhất “Swarm navigation of cyborg-insects in unknown obstructed soft terrain”, ông và nhóm các nhà khoa học Việt Nam và quốc tế đã nghiên cứu việc điều khiển hệ thống bầy đàn mới thông qua việc sử dụng động lực dẫn đầu-theo sau, trong đó một côn trùng cyborg đóng vai trò là thủ lĩnh nhóm dẫn dắt 19 con khác.
Được công bố trên tạp chí Nature Communications, thuật toán mới này đánh dấu một bước tiến đáng kể trong lĩnh vực robot bầy đàn và có thể mở đường cho các ứng dụng trong cứu trợ thiên tai, tìm kiếm cứu nạn và kiểm tra cơ sở hạ tầng.
Các đồng tác giả liên hệ của bài báo, giáo sư Masaki Ogura từ Đại học Hiroshima và giáo sư Wakamiya Naoki từ Đại học Osaka, đã phát triển thuật toán điều khiển đàn và các chương trình máy tính. Còn ở Singapore, giáo sư Hirotaka Sato từ Đại học Công nghệ Nanyang cùng nhóm nhà khoa học người Việt do ông phụ trách chuẩn bị bầy côn trùng người máy, tích hợp thuật toán vào các “ba lô điện tử” gắn trên côn trùng, và tiến hành các thí nghiệm thực tế tại Singapore.
Trong các thí nghiệm trong phòng thí nghiệm, các nhà khoa học đã ghi nhận một số lợi ích của thuật toán bầy đàn mới. Với việc giúp côn trùng cyborg di chuyển tự do, thuật toán của nhóm nghiên cứu hứa hẹn sẽ giảm nguy cơ mắc kẹt trong chướng ngại vật cho côn trùng cyborg, đồng thời cyborg gần đó cũng có thể giúp giải thoát những con bị kẹt hoặc bị lật trong những địa hình hiểm trở.
Khả năng đặc biệt
Các nghiên cứu trước đây đã chứng minh khả năng điều khiển một cyborg hoặc một nhóm cyborg với các thuật toán cung cấp hướng dẫn chi tiết và phức tạp cho từng loài côn trùng. Tuy nhiên, phương pháp này không thể phối hợp chuyển động cho một nhóm lớn.
Với phương pháp mới, côn trùng “lãnh đạo” sẽ được thuật toán chỉ định trước, sau đó được thông báo về đích đến dự kiến và “ba lô điều khiển” của nó sẽ phối hợp với ba lô của những con khác trong nhóm để dẫn đường cho đàn.
Cách tiếp cận “dẫn đầu chuyến đi” này cho phép đàn côn trùng thích nghi một cách linh động, vì chúng có thể hỗ trợ nhau vượt qua chướng ngại vật, điều chỉnh chuyển động nếu một thành viên bị mắc kẹt.
Loại côn trùng được sử dụng là loài gián Madagascar được trang bị bảng mạch nhẹ, cảm biến và pin sạc trên lưng - tạo thành hệ thống định vị tự động giúp chúng định hướng xung quanh và hướng chúng về phía mục tiêu.
Những cyborg này tiêu thụ ít năng lượng hơn đáng kể so với robot truyền thống - những con robot vốn dựa vào động cơ tiêu tốn nhiều năng lượng để di chuyển. Các chân của côn trùng đảm nhận việc di chuyển chiếc “ba lô”, trong khi ba lô điều khiển hướng đi của côn trùng bằng cách gửi các xung điện nhỏ kích thích, hướng nó di chuyển theo một hướng nhất định.
Khi kết hợp với thuật toán kiểm soát đàn, bản năng của côn trùng cho phép chúng di chuyển trên địa hình phức tạp và phản ứng nhanh chóng với những thay đổi của môi trường.
Trong các thí nghiệm, thuật toán mới giúp giảm khoảng 50% số lần cần tác động vào côn trùng so với các phương pháp trước đó, qua đó cho phép côn trùng tự điều hướng linh hoạt hơn khi vượt chướng ngại vật và giải quyết các vấn đề như bị kẹt hoặc mắc bẫy.
Chia sẻ trong thông cáo báo chí của Đại học Công nghệ Nanyang, nhóm nghiên cứu cho biết, công nghệ này được kỳ vọng sẽ trở thành một giải pháp hữu ích trong các nhiệm vụ tìm kiếm và cứu nạn, kiểm tra cơ sở hạ tầng và giám sát môi trường, nơi không gian hẹp và điều kiện không thể đoán trước khiến robot thông thường trở nên kém hiệu quả.
“Để thực hiện các hoạt động tìm kiếm và kiểm tra, chúng ta cần khảo sát hiệu quả trên những khu vực rộng lớn, thường là những nơi có địa hình phức tạp với nhiều chướng ngại vật. Ý tưởng của chúng tôi là triển khai nhiều bầy côn trùng người máy để di chuyển và kiểm tra những khu vực bị cản trở này. Khi cảm biến trên ba lô của một côn trùng người máy phát hiện mục tiêu, chẳng hạn như con người trong nhiệm vụ tìm kiếm cứu nạn hoặc các hư hại cấu trúc trong cơ sở hạ tầng, chúng có thể gửi cảnh báo không dây về hệ thống điều khiển”, nhóm nghiên cứu giải thích.
Giáo sư Sato vốn đã nổi tiếng với những nghiên cứu tiên phong về côn trùng cyborg. Trước đó, ông đã được thế giới công nhận khi nghiên cứu của ông được tạp chí TIME vinh danh là một trong 50 Phát minh Xuất sắc nhất năm 2009 và là một trong 10 Công nghệ Mới nổi năm 2009 (TR10) của MIT Technology Review.
Những thành tựu mới trong nghiên cứu hứa hẹn sẽ đem lại nhiều tiềm năng ứng dụng hơn nữa trong tương lai. Nhóm nghiên cứu cho hay, thuật toán điều khiển bầy đàn của họ là một bước đột phá đáng kể trong việc phối hợp các nhóm côn trùng cyborg cho các nhiệm vụ tìm kiếm cứu nạn phức tạp. Đổi mới này có tiềm năng nâng cao đáng kể hiệu quả ứng phó thảm họa, đồng thời mở ra những hướng nghiên cứu mới về điều khiển bầy đàn. Công nghệ này cũng nhấn mạnh tầm quan trọng của việc phát triển các phương pháp điều khiển hiệu quả trong các tình huống thực tế, vượt ra ngoài các mô hình lý thuyết và mô phỏng.
Không giống như robot, côn trùng không hành động theo đúng ý chúng ta muốn. Tuy nhiên, thay vì cố gắng điều khiển chúng một cách chính xác và cưỡng ép, các nhà khoa học nhận thấy rằng tiếp cận theo hướng thoải mái và tương đối thô sơ lại hiệu quả hơn, đồng thời còn dẫn đến sự xuất hiện tự nhiên của những hành vi phức tạp như hành động hợp tác - một tương tác vốn rất khó thiết kế bằng thuật toán. “Đây là một phát hiện đáng chú ý. Dù thoạt nhìn hành vi của chúng có vẻ ngẫu nhiên, nhưng dường như vẫn còn rất nhiều điều chúng ta có thể học hỏi từ sự tinh vi và phức tạp trong hành vi của sinh vật sống”, nhóm nghiên cứu chia sẻ.
Tiến bộ mới nhất của nhóm nghiên cứu đã làm nổi bật tiềm năng thực tế của các hệ thống lai sinh học trong việc giải quyết các thách thức trong thế giới thực và tầm quan trọng của sự hợp tác nghiên cứu liên ngành toàn cầu.
Nhìn về phía trước, nhóm nghiên cứu chung này đặt mục tiêu phát triển các thuật toán cho phép bầy côn trùng phối hợp thực hiện những hành động phức tạp hơn các chuyển động đơn giản, chẳng hạn như cùng nhau vận chuyển các vật thể lớn.
Họ cũng có kế hoạch tiến hành các thí nghiệm trong môi trường ngoài trời, bao gồm cả các đống đổ nát thường thấy ở các vùng thiên tai, để xác thực tính hiệu quả của thuật toán trong các tình huống phức tạp và thực tế hơn.
Bài đăng KH&PT số 1354 (số 30/2025)